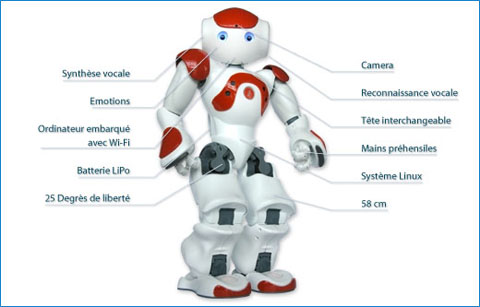
Le projet a été lancé début 2005 et vise à mettre à la disposition du grand public, pour un prix abordable, un robot humanoïde disposant de fonctions mécaniques, électroniques et cognitives dignes des prototypes de recherche (voir graphique ci-dessous). Nao devrait être disponible auprès du grand public fin 2009.
Livré en standard avec des comportements de base, le robot sera dés sa commercialisation le support idéal pour s’initier à la robotique puis, enrichi de nombreux comportements, il deviendra un compagnon autonome pour toute la famille. Il évoluera ultérieurement de son rôle de compagnon vers une vraie fonction d’assistance pour les tâches quotidiennes (surveillance, télé-assistance, informations, lien réel-virtuel…).
Disposant d’une interface de programmation très intuitive dédiée, Choregraphe, il permettra à tous les membres de la famille de découvrir la robotique en s’amusant. Véritable concentré de technologie, notre robot saura également combler les amateurs de nouvelles technologies les plus exigeants.

Nao, conçu à des fins ludiques, sera capable d’interactions avec son propriétaire, et sera évolutif en termes de comportements et de fonctionnalités. Ce dernier pourra lui enseigner de nouveaux comportements à partir de son ordinateur. Le logiciel de création de comportements est conçu pour satisfaire les utilisateurs, quel que soit leur niveau : de la programmation graphique par blocs pour les néophytes, au code pour les plus expérimentés. Les comportements que votre Nao sera capable d’intégrer n’ont qu’une limite : votre imagination !
Convaincus que le design est un élément essentiel pour permettre son adoption dans l’environnement familial, nous avons travaillé cet aspect en partenariat avec une école de design parisienne. Celui-ci se poursuit en particulier avec les designers Thomas Knoll et Erik Arlen. Le look de chaque Nao sera personnalisable, permettant à chacun de disposer d’un robot unique.
Nao est basé sur une plate-forme linux, et embarque Urbi, langage de programmation très simple à aborder, en code pour les experts, ou via une interface graphique pour les néophytes.
Actuellement en phase finale de développement, le premier Nao a été présenté début 2007. Les premiers modèles, destinés aux laboratoires et universités, seront commercialisés à l’automne 2008, et les modèles grand public, fin 2009.